A C Standard Library for BoxLambda.
Updated 2 April 2026: Corrected stale links.
Updated 23 December 2025: Removed reference to ‘On WSL’ documentation.
BoxLambda is a hardware-software cross-over project (see About BoxLambda). The previous posts have been mostly about hardware (as far as FPGA logic can be considered hardware). This post will be about software for a change.
I would like to bring up the C standard library on BoxLambda. Having a standard C environment will help with the overall platform bring-up. It also allows us to run third-party C code, which typically assumes the presence of a standard C environment.
Recap
This is a summary of the current state of BoxLambda. We have:
- A test build consisting of an Ibex RISCV core, a Wishbone shared bus, a Debug Core, internal memory, a timer, two GPIO ports, and a UART core.
- A simple Hello World and LED toggling test program running on the test build.
- An Arty-A7-35T FPGA version of the test build.
- A Verilator version of the test build, for a faster development cycle and automated testing.
- OpenOCD-based Debug Access to the system, both on FPGA and on Verilator.
- A Linux Makefile and Bender-based RTL build system.
Picolibc
I’ll be using the Picolibc standard C library implementation. Picolibc is a Newlib variant, blended with AVR libc, optimized for systems with limited memory. Newlib is the de-facto standard C library implementation for embedded systems.
Building Picolibc
I created a Picolibc fork and added it as a git submodule to BoxLambda’s repository: sub/picolibc/.
Picolibc Configuration Scripts - RV32IMC
A Picolibc build for a new system requires configuration scripts for that system in the picolibc/scripts/ directory. The scripts are named after the selected processor configuration. They specify such things as the compiler toolchain to use, GCC processor architecture flags, and CPP preprocessor flags tweaking specific library features.
I’m using RISCV ISA-string rv32imc as the base name for the new scripts I’m creating. This corresponds with the default -march value of BoxLambda’s GCC toolchain:
riscv32-unknown-elf-gcc -Q --help=target
The following options are target specific:
-mabi= ilp32
-malign-data= xlen
-march= rv32imc
-mbranch-cost=N 0
-mcmodel= medlow
-mcpu=PROCESSOR
-mdiv [disabled]
-mexplicit-relocs [disabled]
-mfdiv [disabled]
-misa-spec= 2.2
-mplt [enabled]
-mpreferred-stack-boundary= 0
-mrelax [enabled]
-mriscv-attribute [enabled]
-msave-restore [disabled]
-mshorten-memrefs [enabled]
-msmall-data-limit=N 8
-mstrict-align [disabled]
-mtune=PROCESSOR
Supported ABIs (for use with the -mabi= option):
ilp32 ilp32d ilp32e ilp32f lp64 lp64d lp64f
Known code models (for use with the -mcmodel= option):
medany medlow
Supported ISA specs (for use with the -misa-spec= option):
2.2 20190608 20191213
Known data alignment choices (for use with the -malign-data= option):
natural xlen
The easiest way to create the new scripts is to derive them from existing scripts for similar platforms. I derived the rv32imc configuration files from the existing rv32imac configuration files:
- do-rv32imc-configure is based on do-rv32imac-configure.
- cross-rv32imc_zicsr.txt is based on cross-rv32imac_zicsr.txt.
- run-rv32imc is based on run-rv32imac.
Zicsr stands for RISCV Control and Status Registers. These are always enabled on Ibex.
The differences between the derived scripts and the base scripts are minimal:
- They are referencing the riscv32-unknown-elf GCC toolchain used by BoxLambda.
- The -march flag is set to rv32imc (no ‘a’ - atomic instructions).
Many other configuration flags can be tweaked, but this will do for now. It’s easier to start from something that works and then make incremental changes than it is to start from scratch.
make setup
Building Picolibc.
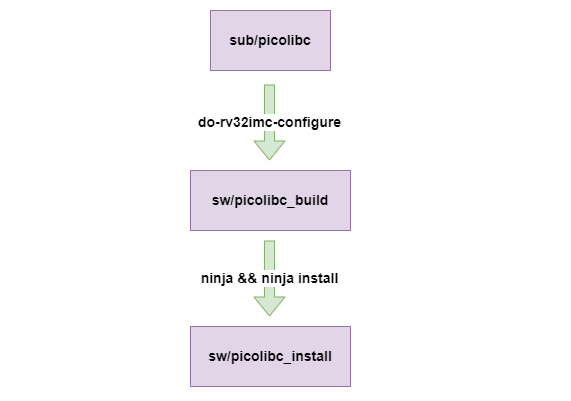
With the configuration scripts in place, we can build and install the picolibc library. We have to supply a build directory and an install directory. I put the build directory in boxlambda/sw/picolibc-build and the install directory in boxlambda/sw/picolibc-install.
I grouped the picolibc build and install instructions in a setup rule in the top-level Makefile:
PICOLIBC_SUB_DIR= $(abspath sub/picolibc) #This is where the picolibc repository lives
PICOLIBC_BUILD_DIR= sw/picolibc-build #This directory is used to build picolibc for our target.
PICOLIBC_INSTALL_DIR= $(abspath sw/picolibc-install) #This is where picolibc is installed after it has been built.
setup: submodule-setup
mkdir -p $(PICOLIBC_BUILD_DIR)
cd $(PICOLIBC_BUILD_DIR)
$(PICOLIBC_SUB_DIR)/scripts/do-rv32imc-configure -Dprefix=$(PICOLIBC_INSTALL_DIR) -Dspecsdir=$(PICOLIBC_INSTALL_DIR)
ninja
ninja install
Ideally, I would just check in the picolibc install directory. However, that won’t work because the generated files contain absolute paths. This means that a make setup step is necessary to set up the BoxLambda repository. Besides building and installing picolibc, this step will also set up the git submodules used by BoxLambda. This also means that, before make setup is run, the boxlambda/sw/picolibc-build and boxlambda/sw/picolibc-install directories won’t even exist. They are not part of the git repository.
Note that make setup does not make any modifications outside of the BoxLambda directory tree.
Bootstrap - Some Glue Required
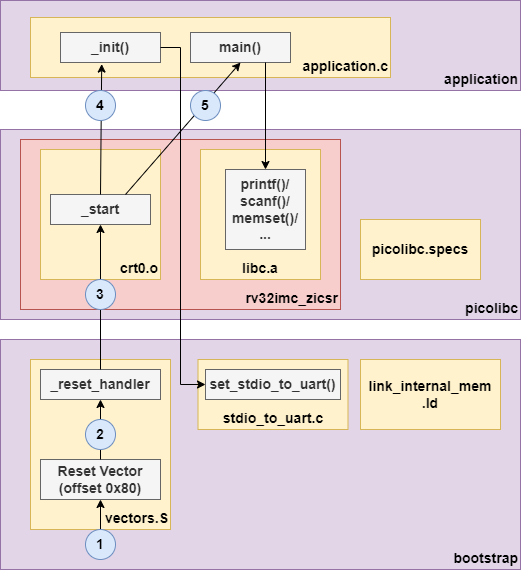
Picolibc on BoxLambda. Picolibc is a relatively generic code base that needs to be tied to the platform it’s running on to function properly. To bring up the library on BoxLambda, we need to supply three pieces of code:
- A Vector Table
- A Link Map
- Standard IO Setup
More detail for each of these follows in the subsections below. I have grouped them into a single software component called bootstrap:
https://github.com/epsilon537/boxlambda/tree/picolibc/sw/bootstrap
An application wishing to use the standard C library has to link in this bootstrap component along with the picolibc library itself.
The Vector Table
The vector table is a table with code entry points for all sorts of CPU events: interrupts, exceptions, etc. The Boot/Reset Vector, i.e. the very first instruction executed when the CPU comes out of reset, is part of this table.
I’m using the Vector Table from the Hello World example program included in the ibex_wb repository. The Vector Table file is located at boxlambda/sw/bootstrap/vectors.S.
The Ibex Boot/Reset vector is at offset 0x80. After some CPU register initialization, the code branches off to _start, the entry point into picolibc’s crt0 module.
Crt0, C-Run-Time-0, is the Standard C library code in charge of setting up a C environment (zeroing the BSS segment, setting up the stack, etc.) before calling main().
Standard Input, Output, and Error
The picolibc integrator needs to supply stdin, stdout, and stderr instances and associated getc() and putc() implementations to connect them to an actual IO device. We’ll be using the UART as our IO device for the time being. Down the road, we can extend that with keyboard input and screen output implementation.
static struct uart *uartp = 0;
static int uart_putc(char c, FILE *file) {
int res;
(void) file; /* Not used in this function */
if (!uartp) {
res = EOF;
}
else {
while (!uart_tx_ready(uartp));
uart_tx(uartp, (uint8_t)c);
res = (int)c;
}
return res;
}
static int uart_getc(FILE *file) {
int c;
(void) file; /* Not used in this function */
if (!uartp) {
c = EOF;
}
else {
while (!uart_rx_ready(uartp));
c = (int)uart_rx(uartp);
}
return c;
}
static FILE __stdio = FDEV_SETUP_STREAM(uart_putc,
uart_getc,
NULL,
_FDEV_SETUP_RW);
FILE *const stdin = &__stdio;
FILE *const stdout = &__stdio;
FILE *const stderr = &__stdio;
void set_stdio_to_uart(struct uart *uart) {
uartp = uart;
}
boxlambda/sw/bootstrap/stdio_to_uart.c
The set_stdio_to_uart() function is to be called from the application, before any standard library calls that require standard IO. The application needs to provide a pointer to an initialized uart object.
The Link Map
We have to tell the linker where in memory to place the program code, data, and stack.
I’m using the Link Map provided by picolibc, slightly modified to include the vector table.
The picolibc link map expects the user to define the following symbols:
- __flash and __flash_size: The location and size of the read-only section of the image, containing code and read-only data,
- __ram and __ram_size: The location and size of the read-write section of the image, containing data segments, bss, and stack.
- __stack_size: The stack size.
I created a link map file for BoxLambda’s internal memory since that’s all we’ve got for the time being. I dedicated the first half (32KB) to the read-only section and the 2nd half (32KB) to the read-write section:
__flash = 0x00000000; /*'flash' is the read-only section of the image, containing code and read-only data*/
__flash_size = 32k;
__ram = 0x00008000; /*'ram' is the read-write section of the image, containing data segments, bss and stack*/
__ram_size = 32k;
__stack_size = 512;
boxlambda/sw/bootstrap/link_internal_mem.ld
I can’t say that I like this link map. There’s no good reason to split internal memory in two this way, I don’t like the symbol names being used, and I don’t understand half of what’s going on in this very big and complicated link map file. Now is not the time to design a new link map for BoxLambda though. We don’t even have external memory defined yet. To be revisited.
Linking against the picolibc library
To link the picolibc library into an application image, the picolibc spec file needs to be passed to GCC. The code snippet below is taken from the picolibc_test program’s Makefile:
#Compile with picolibc specs to pull in picolibc library code.
CFLAGS = --specs=$(TOP_DIR)/sw/picolibc-install/picolibc.specs -Wall -g -O1
The picolibc_test Build
All the pieces are now in place to create a test build. I’ll be using the same FPGA build as for the hello_dbg test (Ibex CPU, RISCV-DBG debug core, internal memory, and UART), with a test program that exercises some basic standard C functions, including standard input and output.
The test build project is located here: boxlambda/projects/picolibc_test
Simulation Changes
On the simulation side, I modified the UART co-simulator class so that it can be used to check both UART input and output (before, only UART co-sim input could be checked):
- I added an enterCharInTxPath() method that, as the name says, allows you to insert characters into the UART co-sim’s transmit path.
- I added a get_tx_string() method along with the already existing get_rx_string() method. It returns all the characters that passed through the UART co-sim’s transmit path, accumulated as a string.
In sim_main.cpp these methods are used like this:
//In interactive mode, characters entered on stdin go to the UART
//(this is implemented in uartsim.cpp).
//In non-interactive mode (i.e. an automated test), enter a
//character into the UART every 100000 ticks.
if (!interactive_mode && ((contextp->time() % 100000) == 0)) {
uart->enterCharInTxPath(INPUT_TEST_CHAR);
}
...
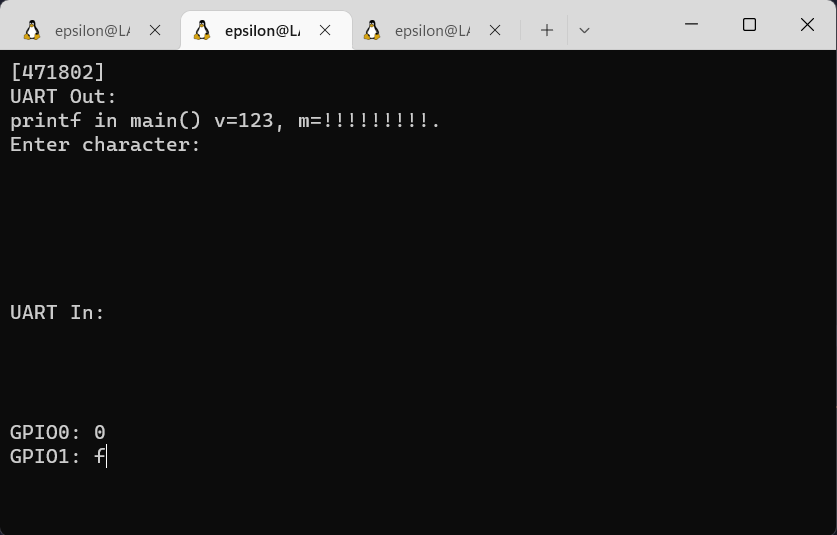
mvprintw(1, 0, "UART Out:");
mvprintw(2, 0, uart->get_rx_string().c_str());
mvprintw(10, 0, "UART In:");
mvprintw(11, 0, uart->get_tx_string().c_str());
The Test Application
The test application program running on the Ibex processor is located in boxlambda/projects/picolibc_test/src/picolibc_test.c
#include <stdio.h>
#include <string.h>
#include "stdio_to_uart.h"
#include "uart.h"
#include "platform.h"
static struct uart uart0;
//_init is executed by picolibc startup code before main().
void _init(void) {
//Set up UART and tie stdio to it.
uart_init(&uart0, (volatile void *) PLATFORM_UART_BASE);
uart_set_baudrate(&uart0, 115200, PLATFORM_CLK_FREQ);
set_stdio_to_uart(&uart0);
}
int main(void) {
int v = 123;
static char m[10] = {0};
char c;
//Some basic libc tests:
memset(m, '!', sizeof(m)-1);
printf("printf in main() v=%d, m=%s.\n", v, m);
printf("Enter character: ");
c = getc(stdin);
printf("Character entered: ");
putc(c, stdout);
return 0;
}
Notice the _init() function. This function is executed by the picolibc startup code before calling main(). This is where we set up the UART and stdio.
Footprint
A quick examination of the generated picolibc_test.elf file shows:
- a .text (code) segment size of 0x2a38 = 10.5Kbytes
- a .data (initialized data) segment size of 0x28 = 40 bytes
- a .bss (zero-initialized data) segment size of 0x18 = 24 bytes
- a .stack size of 0x200 = 512 bytes
This all fits comfortably within our 64KB internal memory.
readelf -S picolibc_test.elf
There are 20 section headers, starting at offset 0x1b108:
Section Headers:
[Nr] Name Type Addr Off Size ES Flg Lk Inf Al
[ 0] NULL 00000000 000000 000000 00 0 0 0
[ 1] .init PROGBITS 00000000 001000 000122 00 AX 0 0 2
[ 2] .text PROGBITS 00000128 001128 002a38 00 AX 0 0 8
[ 3] .data PROGBITS 00008000 004000 000028 00 WA 0 0 4
[ 4] .tbss_space PROGBITS 00008028 004028 000000 00 W 0 0 1
[ 5] .bss NOBITS 00008028 004028 000018 00 WA 0 0 4
[ 6] .stack NOBITS 00008040 004028 000200 00 WA 0 0 1
[ 7] .comment PROGBITS 00000000 004028 00002e 01 MS 0 0 1
[ 8] .riscv.attributes RISCV_ATTRIBUTE 00000000 004056 000026 00 0 0 1
...
Key to Flags:
W (write), A (alloc), X (execute), M (merge), S (strings), I (info),
L (link order), O (extra OS processing required), G (group), T (TLS),
C (compressed), x (unknown), o (OS specific), E (exclude),
p (processor specific)
Debug and Broken Build systems
As you can imagine, bringing up the picolibc library did require a few debug sessions. Bringing up JTAG debug access early on was a good move. Having debug access from the very first instruction onward was a life-saver.
One of the trickier issues I ran into was due to a source code change not triggering a rebuild. For the time being, I used make force rules to force software builds to always be complete rebuilds. Yes, that is terrible. I’ll have to invest in a proper software build system. That’s a topic for a future post.
Try It Out
Repository setup
- Install the Prerequisites.
- Get the BoxLambda repository:
git clone https://github.com/epsilon537/boxlambda/ cd boxlambda - Switch to the picolibc tag:
git checkout picolibc - Set up the repository. This initializes the git submodules used and builds picolibc for BoxLambda:
make setup
Build and Run the Picolibc Test Image on Verilator
- Build the test project:
cd projects/picolibc_test make sim - Execute the generated verilator model in interactive mode:
cd generated ./Vmodel -i - You should see something like this:
Build and Run the Picolibc_test Image on Arty A7
- Build the test project:
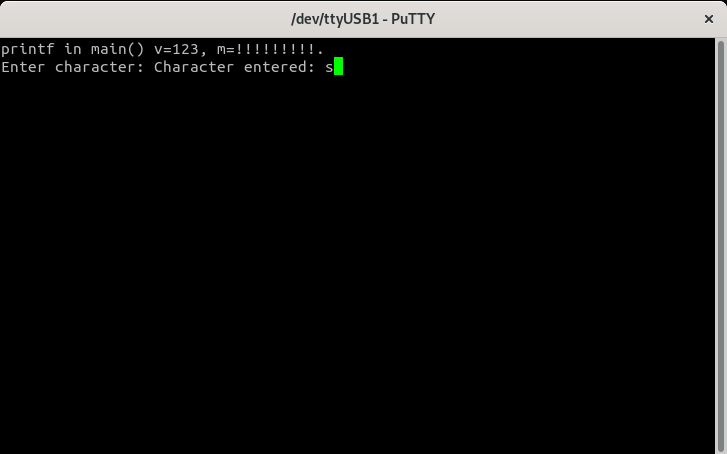
cd projects/picolibc_test make impl - Connect a terminal program such as Putty or Teraterm to Arty’s USB serial port. Settings: 115200 8N1.
- Run the project:
make run - Verify the test program’s output in the terminal. Enter a character to verify that stdin (standard input) is also working.
Other Changes
As the project grows, so do the opportunities for improvements. To keep track of everything, I’ve started creating GitHub issues for the BoxLambda repository:
https://github.com/epsilon537/boxlambda/issues.
Interesting Links
https://store.steampowered.com/app/1444480/Turing_Complete/: I love video games. I love designing computers. Now I can do both at the same time! If I would purchase this game, you probably won’t be seeing any BoxLambda updates until I complete the game.